
اولین پروژه ای که من در آن از سروو موتور استفاده کرده ام، پروژه ای بود که مشابه آن زیاد در ایران وجود نداشت و هیچ سرنخ اولیه ای نداشتم. دستگاه برای جوشکاری اتوماتیک خطوط T ، H بود که در ساخت سوله ها و سازه های پیش ساخته استفاده می شد. شکل دستگاه در تصاویر مشاهده می شود.
دستگاه بصورت دوقلو کار می کرد و هر بخش دارای دو محور بود که یکی به اسم محور X و دیگری محورY بود. هر کدام از این محورها توسط یک سروو 400 وات برند دلتا به کد ecma-c20604rs کنترل می شد. البته هر کدام دارای یک درایو جداگانه هم بودند که وظیفه فرمان دادن به سروو موتورها را به عهده داشتند. که بالطبع مورد استفاده سروو موتور دلتا b2asd-b20421b با توان 400 وات بود. بنابراین دستگاه دارای 4 عدد سروو delta بود. این سرووها به یک کنترل کننده اصلی متصل می شد. که یک plc دلتا dvp28sv211t بود. در کنار آن یک مانیتور وجود داشت که به آن hmi می گفتند. مانیتور لمسی استفاده شده، hmi دلتا dop107cv بود.
هر محور دارای یک سنسور القایی آنالوگ بود که برای تنظیم فاصله دستگاه با تیرآهن استفاده می شد. در واقع با افزایش فاصله سنسورها از دستگاه plc تصمیم می گیرد به سرووها فرمان دهد.
راه اندازی سروو موتور دلتا
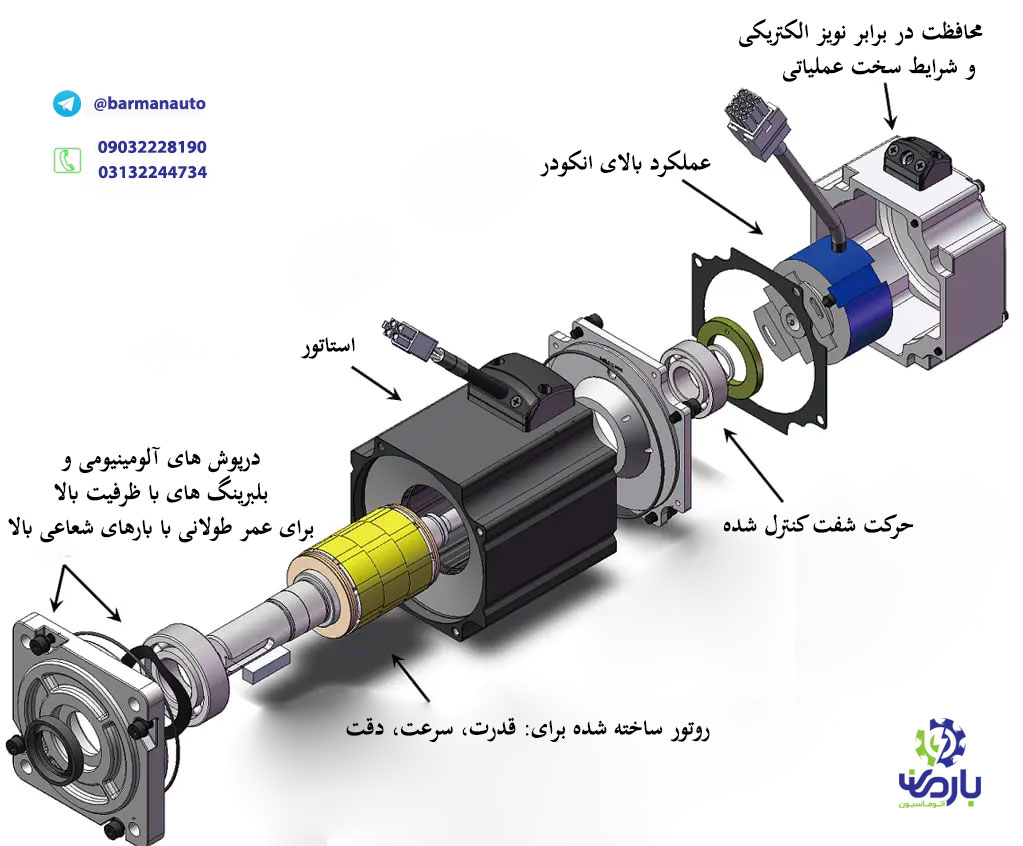
سروو موتور نسبت به موتورهای القایی دارای 2 ویژگی منحصربفرد است که آن را از موتورهای معمولی متمایز می کند. اولی خود ساختار رتور موتور است که از نوع مغناطیس دائم است و باعث می شود قدرت و گشتاور تحویلی به موتور به بار از سرعت صفر تا سرعت نامی برسد. این ویژگی باعث شده انواع سروو موتور در کاربردهای دقیق مثل دستگاه های CNC و ربات ها استفاده شود. بنابراین فروش سروو به تنهایی بخش اعظمی از پیشرفت صنعت را به دوش کشیده است. بخش دوم و اساسی سروموتورها انکودر است که در انتهای موتور قرار دارد و موقعیت و سرعت موتور را به درایو گزارش می دهد. بر اساس آن درایو تصمیم می گیرد با چه روشی کار کند. در زیر شکل سروو موتور قابل مشاهده است.
انواع مدکنترلی سروو موتور
مدکنترلی PT (ارسال پالس) مدکنترلی PR (پارامترهای داخلی)
مدکنترلی S (سرعت خارجی) مدکنترلی SZ (سرعت داخلی)
مدکنترلی T (گشتاور داخلی) مدکنترلی TZ (گشتاور خارجی)
مهمترین مدکنترلی، مد کاریPT (پوزیشن) است. اتفاقا ما هم در این پروژه از مد کاری پوزیشن یا قطار پالس استفاده می کنیم، که در آن پالس از طریقplc به ورودی CN1 وارد می شود تا به ازای تعداد پالس مشخصی که ارسال می شود سروو موتور n درجه بچرخد و از این طریق موقعیت سروو موتورها کنترل می شود. اگر بخواهیم شرح ساده ای از کنترل سروو موتورها را بیان کنم باید بگویم اگر دقت انکودر انتهای موتور ده هزار پالس باشد، با اعمال ده هزار پالس به سروو درایو و کنترل موتور توسط درایو موتور یک دور کامل خواهد زد و آنگاه فرکانس پالس اعمالی به سروو درایو تعیین کننده سرعت خواهد بود. به زبان ساده، هرچه فرکانس اعمالی به سروو بیشتر باشد در نهایت موتور با سرعت بیشتری به چرخش در می آید.
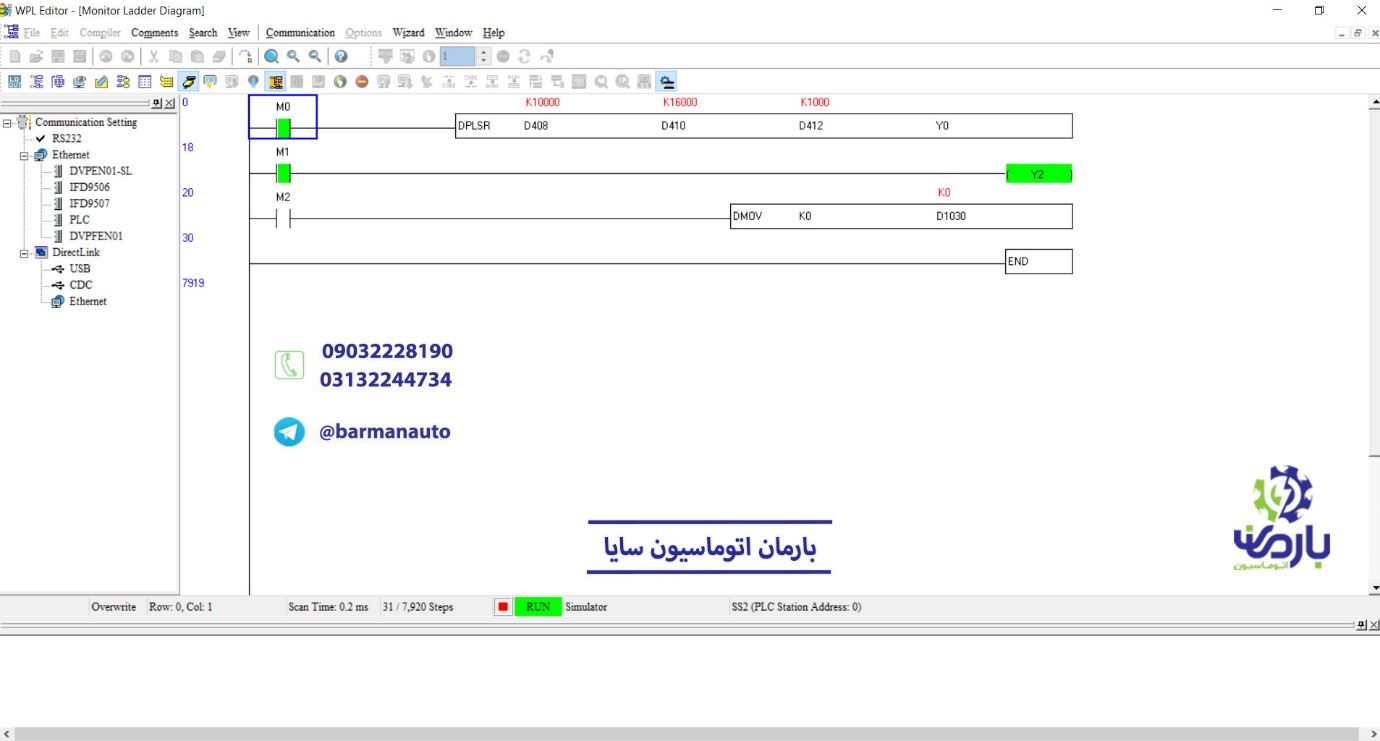
دستور کنترل موقعیت سروو موتور دلتا در پی ال سی
دستور PLSR در پی ال سی دلتا یک دستور مخصوص برای کنترل موقعیت سروو موتور دلتا است، که در آن سه پارامتر اصلی تعریف می شود. پارامتر اول سرعت چرخش موتور را تعیین می کند که در اصطلاح به آن فرکانس می گویند. پارامتر دوم مقدار جابجایی موتور را که به آن پوزیشن می گویند، مشخص می کند. پارامتر بعدی شیب راه اندازی و توقف را تعیین می کند. آخرین پارامتر مربوط به تعیین پین خروجی است که از آن برای اتصال plc به سروو استفاده می شود. لازم بذکر است که روش راه اندازی سروو موتورها در مد پوزیشن متفاوت است ولی ما از روش پالس و پوزیشن استفاده می کنیم که یک خروجی وظیفه ارسال پالس به سروو دارد و از یک خروجی روی plc برای تغییر جهت چرخش موتور استفاده می شود. بطوریکه زمانیکه یک خروجی فعال است در یک جهت و زمانیکه آن خروجی غیر فعال است در جهت دیگر موتور چرخش می کند.
انتخاب نوع پالس ورودی
برای انتخاب نوع پالس ورودی برای حالت Pulse+direction کافی است پارامتر P01.00 را روی عدد 2 تنظیم کنیم. این پارامتر در حالت تنظیمات کارخانه روی این عدد تنظیم شده است و نیازی به تغییر آن نیست.
تنظیم پارامترهای گیربکس سروو موتور
ضریب گیربکس موتور هم در سرعت و هم در جابجایی موتور تاثیر دارد. پس با تنظیم هوشمندانه آن می توانیم به سرعت یا موقعیت دلخواه خود برسیم. برای تنظیم ضریب گیربکس باید پارامترهای P01-44 و P01-45 را که در صورت و مخرج کسر گیربکس الکترونیکی هستند تنظیم کنیم. محاسبات لازم برای تنظیم مقدار چرخش موتور به ازای تعداد پالس داده شده به سروو به صورت زیر است:
servo motor A2:( تعداد پالس *P01_44 ) / P01_45 /1280000=تعداد دور
servo motor B2:( تعداد پالس *P01_44 ) / P01_45 /160000=تعداد دور
فرمول بالا نشان دهنده این است که سروو موتور دلتا b2 در یک دور کامل 160000 پالس و سروو موتور دلتا a2 1280000 پالس تولید می کند. درصورتی که بخواهیم تعداد دور موتور را افزایش دهیم به طور مثال موتور 3 دور بچرخد، باید پارامترهای P01-44 و P01-45 را به گونه ای تنظیم کنیم که هنگامی که در تعداد پالس ضرب شود برابر با عدد 160000*3=480000 شود. درصورتی که قصد تغییر پارامترهای P01-44 و P01-45 را نداشته باشیم می توانیم با ثابت نگه داشتن ضریب گیربکس و افزایش تعداد پالس، طبق فرمول بالا به تعداد دور مورد نظر برای سروو موتور برسیم.
هم چنین جهت افزایش سرعت چرخش موتور می توانیم پارامتر اول در دستورPLSR که مربوط به فرکانس است، تغییر دهیم و در فرمول بالا به جای تعداد پالس، فرکانس را جایگذاری کنیم که برابر با سرعت موتور می شود.
همانطور که در بالا اشاره شد و طبق فرمول های ارائه شده در رابطه با سرعت و جابجایی به این نتیجه می رسیم که ضریب گیربکس هم در سرعت و هم در جابجایی تاثیر دارد. پس با تنظیم پارامترهای P01-44 و P01-45و ثابت نگه داشتن آن میتوانیم با تغییر فرکانس به سرعت دلخواه و با تغییر تعداد دور به موقعیت دلخواه برسیم.
قیمت تمامی محصولات به همراه جزئیات در سایت بارمان اتوماسیون سایا درج شده است تا به کمک آن خرید مطمئنی را تجربه کنید. barmanauto.ir





نظر شما